|
|
|
|
non-Linear Tangential contact forces in MercuryDPM implemented as MindlinSpecies, MindlinInteraction and MindlinRollingTorsionSpecies, MindlinRollingTorsionInteraction.
Mindlin and Deresewicz developed a set of rules for general and oblique impact problems with an incremental procedure which also accounts for micro-slip. A plain (without micro-slip) and still accurate approach has been proposed by Di Renzo and Di Maio in 2005.
The tangential model force is given by:
\( f_{ij}^t = \underbrace{\frac{2}{3} k_t \delta_{ij}^t}_{\text{Elastic}} + \underbrace{\gamma_t v_{ij}^t}_{\text{Dissipative}}\)
The tangential force is subdivided into an elastic and dissipative (damping) part.
The tangential spring stiffness \( k_t = 8 G_{ij}^* sqrt{R_{ij}^* \delta_{ij}^n} \) depends on the effective shear modulus for isotropic and homegeneous materials \( G_{ij}^* = (\frac{1-\nu_i}{G_i} + \frac{1-\nu_j}{G_j})^{-1} \), the effective radius \( R_{ij}^* = \frac{R_i R_j}{R_i + R_j} \) and the normal overlap \( \delta_{ij}^n \) of object \( i \) and \( j \).
The tangential overlap \( \delta_{ij}^t = \int_{0}^{\tau} v_{ij}^t dt \) accounts for the tangential displacement by integrating their relative tangential velocity \( v_{ij}^t \) over the contact time.
The elastic tangential force is limited by the Coulomb friction criterion \( \frac{2}{3} k_t \delta_{ij}^t \leq \mu f_{ij}^n \). As soon as the Coulomb criterion is met, the tangential forces are set to \( f_{ij}^t = f_{ij}^n \).
The dissipative part of the model is calculated by multiplying the relative tangential velocity \( v_{ij}^{t} \) with the viscoelastic tangential damping constant \( \gamma_t = \varphi_{ij}^s \sqrt{m_{ij}^* k_t} \) which depends on the sliding dissipation coefficient \( \varphi_{ij}^s \) set by the user, the effective mass \( m_{ij}^* \) as well as the tangential spring stiffness \( k_t \). This part of the tangential force is only added while the Coulomb criterion is not met
( \( \frac{2}{3} k_t \delta_{ij}^t < \mu f_{ij}^n \)).
The sliding dissipation coefficient is different for certain simulation cases. However, some DEM-software developers (e.g. EDEM, LIGGGHTS, Yade) specify their sliding dissipation coefficient to \( \varphi_{ij}^s = 2\sqrt{\frac{5}{6}}\frac{\ln{e}}{\sqrt{\ln{e}^2 + \pi^2}}\) where \( e \) is the restitution coefficient.
Header:
Interaction function:
The model parameters are set using MindlinSpecies (and MindlinRollingTorsionSpecies) member functions:
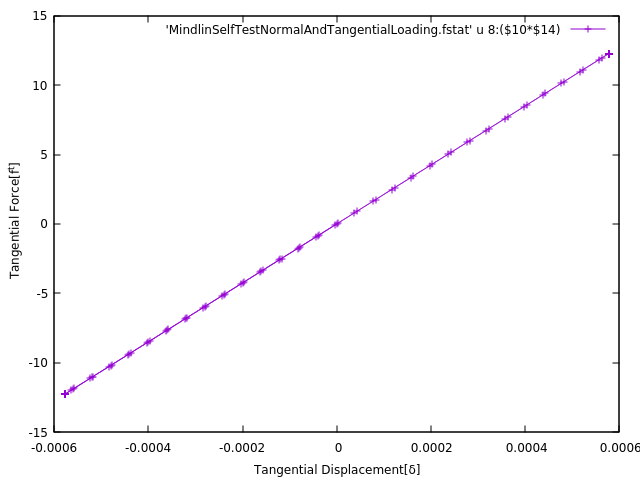
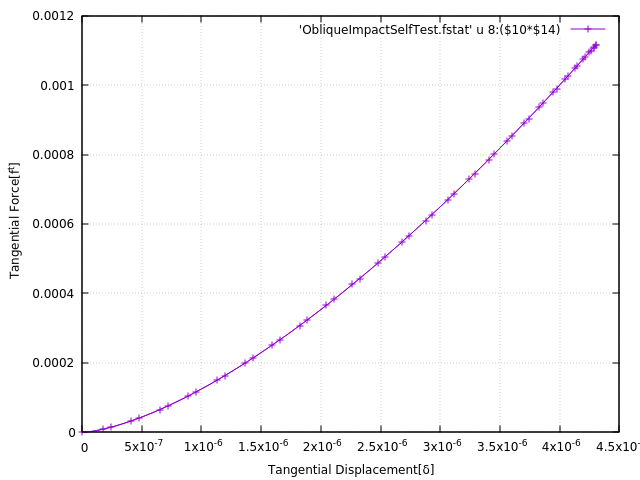
Selftest: MindlinSelfTest.cpp
Contact behaviour for an loading-unloading-reloading test:
Contact behaviour for an oblique impact test:
References:
1- Mindlin, R.D. and Deresiewicz, H. (1953), Elastic Spheres in Contact under Varying Oblique Force. Trans. ASME, J. Appl. Mech. 20, 327-344
2- Di Renzo, A. and Di Maio, F. P. (2004), Comparison of contact-force models for the simulation of collisions in DEM-based granular flow codes. Chem. Eng. Sci., vol. 59, no. 3
3- Di Renzo, A. and Di Maio, F. P. (2005), An improved integral non-linear model for the contact of particles in distinct element simulations. Chem. Eng. Sci., vol. 60, no. 5
4- Tsuji, Y., Tanaka, T. and Ishida, T. (1992), Lagrangian numerical simulation of plug flow of cohesionless particles in a horizontal pipe. Powder Technology, vol. 71, no. 3, p. 239-250