|
MercuryDPM
0.10
|
|
MercuryDPM
0.10
|
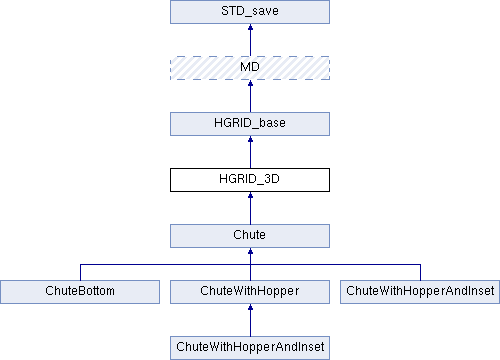
This adds on the hierarchical grid code for 3D problems. More...
#include <HGRID_3D.h>
 Inheritance diagram for HGRID_3D:
Inheritance diagram for HGRID_3D:Public Member Functions | |
| HGRID_3D () | |
| This is the default constructor. All it does is set senible defaults. More... | |
| HGRID_3D (MD &other) | |
| Copy-constructor for creates an HGRID problem from an existing MD problem. More... | |
| HGRID_3D (HGRID_base &other) | |
| void | constructor () |
| This is the actually constructor it is called do both constructors above. More... | |
| Public Member Functions inherited from HGRID_base | |
| HGRID_base () | |
| This is the default constructor. All it does is set senible defaults. More... | |
| ~HGRID_base () | |
| This is the default destructor. More... | |
| HGRID_base (MD &other) | |
| Copy-constructor for creates an HGRID problem from an existing MD problem. More... | |
| void | constructor () |
| This is the actually constructor it is called do both constructors above. More... | |
| void | HGRID_actions_before_time_loop () |
| This sets up the broad phase information, has to be done at this stage becuase it requires the partcle size. More... | |
| void | HGRID_actions_before_time_step () |
| This resets all the bucket information. More... | |
| void | set_HGRID_num_buckets (unsigned int new_num_buckets) |
| This sets the number of buckets for the HGRID. More... | |
| void | set_HGRID_num_buckets_to_power () |
| set number of buckets to the smallest power of two bigger than the number of particles More... | |
| void | set_HGRID_num_buckets_to_power (unsigned int N) |
| set number of buckets to the smallest power of two bigger than N More... | |
| void | read (std::istream &is) |
| This function reads all HGRID data. More... | |
| void | write (std::ostream &os) |
| This function writes all HGRID data. More... | |
| void | print (std::ostream &os, bool print_all) |
| This function outputs all HGRID data. More... | |
| Mdouble | getHGridCurrentMaxRelativeDisplacement () |
| Mdouble | getHGridTotalCurrentMaxRelativeDisplacement () |
| void | setHGridUpdateEachTimeStep (bool updateEachTimeStep) |
| bool | getHGridUpdateEachTimeStep () |
| void | setHGridMaxLevels (int HGridMaxLevels) |
| int | getHGridMaxLevels () |
| HGridMethod | getHGridMethod () |
| void | setHGridMethod (HGridMethod hGridMethod) |
| HGridDistribution | getHGridDistribution () |
| void | setHGridDistribution (HGridDistribution hGridDistribution) |
| Mdouble | getHGridCellOverSizeRatio () |
| void | setHGridCellOverSizeRatio (Mdouble cellOverSizeRatio) |
| Public Member Functions inherited from MD | |
| void | constructor () |
| A public constructor, which sets defaults so the problem can be solved off the shelf. More... | |
| MD () | |
| MD (STD_save &other) | |
| virtual | ~MD () |
| void | info () |
| Set up a virtual info this will be provided from the inhertiance. More... | |
| void | solve () |
| The work horse of the code. More... | |
| void | solve (unsigned int argc, char *argv[]) |
| Read arguments before solving. More... | |
| void | solveWithMDCLR () |
| Tries to solve the problem using MDCLR. More... | |
| Mdouble | get_t () |
| Access function for the time. More... | |
| void | set_t (Mdouble new_t) |
| Access function for the time. More... | |
| int | get_NSpecies () |
| Allows the number of Species to be accessed. More... | |
| std::vector< CSpecies > & | get_Species (void) |
| Allows the species to be copied. More... | |
| CSpecies * | get_Species (int i) |
| Allows the species to be accessed. More... | |
| CSpecies * | get_MixedSpecies (int i, int j) |
| Allows the mixed species to be accessed. More... | |
| void | set_MixedSpecies (int i, int j, CSpecies &S) |
| Allows the mixed species to be set. More... | |
| void | set_tmax (Mdouble new_tmax) |
| Allows the upper time limit to be changed. More... | |
| Mdouble | get_tmax () |
| Allows the upper time limit to be accessed. More... | |
| ParticleHandler & | getParticleHandler () |
| WallHandler & | getWallHandler () |
| BoundaryHandler & | getBoundaryHandler () |
| void | set_savecount (int new_) |
| Allows the number of time steps between saves to be changed, see also set_number_of_saves. More... | |
| void | set_save_count_all (int new_) |
| void | set_save_count_data (int new_) |
| void | set_save_count_ene (int new_) |
| void | set_save_count_stat (int new_) |
| void | set_save_count_fstat (int new_) |
| int | get_savecount () |
| Allows the number of time steps between saves to be accessed. More... | |
| int | get_save_count () |
| int | get_save_count_data () |
| int | get_save_count_ene () |
| int | get_save_count_stat () |
| int | get_save_count_fstat () |
| void | set_do_stat_always (bool new_) |
| Sets how often the data is saved using the number of saves wanted, tmax, and dt. See also set_savecount. More... | |
| void | set_number_of_saves (Mdouble N) |
| void | set_number_of_saves_all (Mdouble N) |
| void | set_number_of_saves_data (Mdouble N) |
| void | set_number_of_saves_ene (Mdouble N) |
| void | set_number_of_saves_stat (Mdouble N) |
| void | set_number_of_saves_fstat (Mdouble N) |
| void | set_plastic_k1_k2max_kc_depth (Mdouble k1_, Mdouble k2max_, Mdouble kc_, Mdouble depth_, unsigned int indSpecies=0) |
| Allows the plastic constants to be changed. More... | |
| void | set_k1 (Mdouble new_, unsigned int indSpecies=0) |
| void | set_k2max (Mdouble new_, unsigned int indSpecies=0) |
| void | set_kc (Mdouble new_, unsigned int indSpecies=0) |
| void | set_depth (Mdouble new_, unsigned int indSpecies=0) |
| Mdouble | get_k1 (unsigned int indSpecies=0) |
| Allows the plastic constants to be accessed. More... | |
| Mdouble | get_k2max (unsigned int indSpecies=0) |
| Mdouble | get_kc (unsigned int indSpecies=0) |
| Mdouble | get_depth (unsigned int indSpecies=0) |
| Mdouble | get_plastic_dt (Mdouble mass, unsigned int indSpecies=0) |
| void | set_k (Mdouble new_, unsigned int indSpecies=0) |
| Allows the spring constant to be changed. More... | |
| Mdouble | get_k (int indSpecies=0) |
| Allows the spring constant to be accessed. More... | |
| void | set_kt (Mdouble new_, unsigned int indSpecies=0) |
| Allows the spring constant to be changed. More... | |
| Mdouble | get_kt (int indSpecies=0) |
| Allows the spring constant to be accessed. More... | |
| void | set_krolling (Mdouble new_, unsigned int indSpecies=0) |
| Allows the spring constant to be changed. More... | |
| Mdouble | get_krolling (int indSpecies=0) |
| Allows the spring constant to be accessed. More... | |
| void | set_ktorsion (Mdouble new_, unsigned int indSpecies=0) |
| Allows the spring constant to be changed. More... | |
| Mdouble | get_ktorsion (int indSpecies=0) |
| Allows the spring constant to be accessed. More... | |
| void | set_rho (Mdouble new_, unsigned int indSpecies=0) |
| Allows the density to be changed. More... | |
| Mdouble | get_rho (int indSpecies=0) |
| Allows the density to be accessed. More... | |
| void | set_dispt (Mdouble new_, unsigned int indSpecies=0) |
| Allows the tangential viscosity to be changed. More... | |
| Mdouble | get_dispt (unsigned int indSpecies=0) |
| Allows the tangential viscosity to be accessed. More... | |
| void | set_disprolling (Mdouble new_, unsigned int indSpecies=0) |
| Allows the tangential viscosity to be changed. More... | |
| Mdouble | get_disprolling (unsigned int indSpecies=0) |
| Allows the tangential viscosity to be accessed. More... | |
| void | set_disptorsion (Mdouble new_, unsigned int indSpecies=0) |
| Allows the tangential viscosity to be changed. More... | |
| Mdouble | get_disptorsion (unsigned int indSpecies=0) |
| Allows the tangential viscosity to be accessed. More... | |
| void | set_disp (Mdouble new_, unsigned int indSpecies=0) |
| Allows the normal dissipation to be changed. More... | |
| Mdouble | get_disp (unsigned int indSpecies=0) |
| Allows the normal dissipation to be accessed. More... | |
| void | set_dissipation (Mdouble new_, unsigned int indSpecies=0) |
| Allows the normal dissipation to be changed. More... | |
| Mdouble | get_dissipation (unsigned int indSpecies=0) |
| Allows the normal dissipation to be accessed. More... | |
| void | set_mu (Mdouble new_, unsigned int indSpecies=0) |
| Allows the Coulomb friction coefficient to be changed. More... | |
| Mdouble | get_mu (unsigned int indSpecies=0) |
| Allows the Coulomb friction coefficient to be accessed. More... | |
| void | set_murolling (Mdouble new_, unsigned int indSpecies=0) |
| Allows the Coulomb friction coefficient to be changed. More... | |
| Mdouble | get_murolling (unsigned int indSpecies=0) |
| Allows the Coulomb friction coefficient to be accessed. More... | |
| void | set_mutorsion (Mdouble new_, unsigned int indSpecies=0) |
| Allows the Coulomb friction coefficient to be changed. More... | |
| Mdouble | get_mutorsion (unsigned int indSpecies=0) |
| Allows the Coulomb friction coefficient to be accessed. More... | |
| void | set_rotation (bool new_) |
| bool | get_rotation () |
| void | set_dim_particle (int new_, unsigned int indSpecies=0) |
| Allows the dimension of the particle (f.e. for mass) to be changed. More... | |
| int | get_dim_particle (unsigned int indSpecies=0) |
| Allows the dimension of the particle (f.e. for mass) to be accessed. More... | |
| bool | get_save_data_data () |
| Returns the data counter. More... | |
| bool | get_save_data_ene () |
| bool | get_save_data_fstat () |
| bool | get_save_data_stat () |
| bool | get_do_stat_always () |
| void | set_k_and_restitution_coefficient (Mdouble k_, Mdouble eps, Mdouble mass, unsigned int indSpecies=0) |
| Sets k, disp such that it matches a given tc and eps for a collision of two copies of P. More... | |
| void | set_collision_time_and_restitution_coefficient (Mdouble tc, Mdouble eps, Mdouble mass, unsigned int indSpecies=0) |
| Sets k, disp such that it matches a given tc and eps for a collision of two copies of P. More... | |
| void | set_collision_time_and_restitution_coefficient (Mdouble tc, Mdouble eps, Mdouble mass1, Mdouble mass2, unsigned int indSpecies=0) |
| Set k, disp such that is matches a given tc and eps for a collision of two different masses. More... | |
| void | set_collision_time_and_normal_and_tangential_restitution_coefficient (Mdouble tc, Mdouble eps, Mdouble beta, Mdouble mass1, Mdouble mass2, unsigned int indSpecies=0) |
| See CSpecies::set_collision_time_and_normal_and_tangential_restitution_coefficient. More... | |
| void | set_collision_time_and_normal_and_tangential_restitution_coefficient_nodispt (Mdouble tc, Mdouble eps, Mdouble beta, Mdouble mass1, Mdouble mass2, unsigned int indSpecies=0) |
| See CSpecies::set_collision_time_and_normal_and_tangential_restitution_coefficient. More... | |
| Mdouble | get_collision_time (Mdouble mass, unsigned int indSpecies=0) |
| Calculates collision time for two copies of a particle of given disp, k, mass. More... | |
| Mdouble | get_restitution_coefficient (Mdouble mass, unsigned int indSpecies=0) |
| Calculates restitution coefficient for two copies of given disp, k, mass. More... | |
| Mdouble | get_xmin () |
| Get xmin. More... | |
| Mdouble | get_xmax () |
| Get xmax. More... | |
| Mdouble | get_ymin () |
| Gets ymin. More... | |
| Mdouble | get_ymax () |
| Gets ymax. More... | |
| Mdouble | get_zmin () |
| Gets zmin. More... | |
| Mdouble | get_zmax () |
| Gets zmax. More... | |
| void | set_xmin (Mdouble new_xmin) |
| Sets xmin and walls, assuming the standard definition of walls as in the default constructor. More... | |
| void | set_ymin (Mdouble new_ymin) |
| void | set_zmin (Mdouble new_zmin) |
| Sets ymin and walls, assuming the standard definition of walls as in the default constructor. More... | |
| void | set_xmax (Mdouble new_xmax) |
| Sets xmax and walls, assuming the standard definition of walls as in the default constructor. More... | |
| void | set_ymax (Mdouble new_ymax) |
| Sets ymax and walls, assuming the standard definition of walls as in the default constructor. More... | |
| void | set_zmax (Mdouble new_zmax) |
| Sets ymax and walls, assuming the standard definition of walls as in the default constructor. More... | |
| void | set_dt (Mdouble new_dt) |
| Allows the time step dt to be changed. More... | |
| Mdouble | get_dt () |
| Allows the time step dt to be accessed. More... | |
| void | set_name (const char *name) |
| Sets the name of the problem, used for the same data files. More... | |
| void | set_xballs_colour_mode (int new_cmode) |
| Set the xball output mode. More... | |
| void | set_xballs_cmode (int new_cmode) |
| int | get_xballs_cmode () |
| void | set_xballs_vector_scale (double new_vscale) |
| Set the scale of vectors in xballs. More... | |
| double | get_xballs_vscale () |
| void | set_xballs_additional_arguments (std::string new_) |
| Set the additional arguments for xballs. More... | |
| std::string | get_xballs_additional_arguments () |
| void | set_xballs_scale (Mdouble new_scale) |
| Set the scale of the xballs problem. The default is fit to screen. More... | |
| double | get_xballs_scale () |
| void | set_gravity (Vec3D new_gravity) |
| Allows the gravitational acceleration to be changed. More... | |
| Vec3D | get_gravity () |
| Allows the gravitational acceleration to be accessed. More... | |
| void | set_dim (int new_dim) |
| Allows the dimension of the simulation to be changed. More... | |
| int | get_dim () |
| Allows the dimension of the simulation to be accessed. More... | |
| int | get_restart_version () |
| Gets restart_version. More... | |
| void | set_restart_version (int new_) |
| Sets restart_version. More... | |
| bool | get_restarted () |
| Gets restarted. More... | |
| Mdouble | get_max_radius () |
| Sets restarted. More... | |
| void | set_restarted (bool new_) |
| bool | get_append () |
| Gets restarted. More... | |
| void | set_append (bool new_) |
| Sets restarted. More... | |
| Mdouble | get_ene_ela () |
| Gets ene_ela. More... | |
| void | set_ene_ela (Mdouble new_) |
| Sets ene_ela. More... | |
| void | add_ene_ela (Mdouble new_) |
| Sets ene_ela. More... | |
| void | Remove_Particle (int IP) |
| This function removes partice IP from the vector of particles by moving the last particle in the vector to the position if IP Also it checks if the moved Particle has any tangentialsspring-information, which needs to be moved to a different particle, because tangential spring information always needs to be stored in the real particle with highest particle index. More... | |
| Mdouble | get_Mass_from_Radius (Mdouble radius, int indSpecies=0) |
| Mdouble | get_maximum_velocity (BaseParticle &P) |
| Calculates the maximum velocity allowed for a collision of two copies of P (for higher velocities particles could pass through each other) More... | |
| virtual BaseParticle * | getSmallestParticle () |
| virtual BaseParticle * | getLargestParticle () |
| virtual void | removeParticle (int iP) |
| Mdouble | get_maximum_velocity () |
| void | set_dt_by_mass (Mdouble mass) |
| Sets dt to 1/50-th of the collision time for two particles of mass P. More... | |
| void | set_dt (BaseParticle &P) |
| Sets dt to 1/50-th of the collision time for two copies of P. More... | |
| void | set_dt () |
| Sets dt to 1/50-th of the smallest possible collision time. More... | |
| virtual void | setup_particles_initial_conditions () |
| This function allows the initial conditions of the particles to be set, by default locations is random. More... | |
| virtual void | create_xballs_script () |
| This creates a scipt which can be used to load the xballs problem to display the data just generated. More... | |
| virtual double | getInfo (BaseParticle &P) |
| Allows the user to set what is written into the info column in the data file. By default is store the Species ID number. More... | |
| virtual void | save_restart_data () |
| Stores all MD data. More... | |
| int | load_restart_data () |
| Loads all MD data. More... | |
| int | load_restart_data (std::string filename) |
| void | statistics_from_restart_data (const char *name) |
| Loads all MD data and plots statistics for all timesteps in the .data file. More... | |
| virtual void | write_v1 (std::ostream &os) |
| Writes all MD data. More... | |
| virtual void | read_v1 (std::istream &is) |
| Reads all MD data. More... | |
| virtual void | read_v2 (std::istream &is) |
| bool | load_from_data_file (const char *filename, unsigned int format=0) |
| This allows particle data to be reloaded from data files. More... | |
| bool | load_par_ini_file (const char *filename) |
| allows the user to read par.ini files (useful to read MDCLR files) More... | |
| bool | read_next_from_data_file (unsigned int format=0) |
| by default format do not pass an argument; only specify format if you have to read a special format (f.e. dim=2, but format=14 (3d format)) More... | |
| int | read_dim_from_data_file () |
| bool | find_next_data_file (Mdouble tmin, bool verbose=true) |
| void | add_Species (CSpecies &S) |
| void | add_Species (void) |
| void | set_format (int new_) |
| int | get_format () |
| int | readArguments (unsigned int argc, char *argv[]) |
| Can interpret main function input arguments that are passed by the driver codes. More... | |
| Public Member Functions inherited from STD_save | |
| STD_save () | |
| Default constructor: sets the counter to 0 (i.e. no number will be included). More... | |
| STD_save (STD_save &other) | |
| Copy constructor. More... | |
| void | constructor () |
| void | inc_counter_in_file () |
| Increament the counter value stored in the file_counter by 1 and store the new value. More... | |
| int | read_run_num_from_file () |
| Read rom the counter file the counter. More... | |
| void | set_counter_from_file () |
| Sets the counter based on the current number stored in the counter file. More... | |
| void | save_info_to_disk () |
| Saves the information generated by info to disk in a file. More... | |
| void | set_counter (int new_counter) |
| This set the counter, overriding the defaults. More... | |
| int | get_counter () |
| This returns the current value of the counter. More... | |
| bool | FileExists (std::string strFilename) |
| Function to check if a file exists, is used to check if a run has already need done. More... | |
| void | auto_number () |
| std::vector< int > | get_numbers (int size_x, int size_y) |
| This turns a counter into two indexs for doing parmater studies. The indexs run from 1:size_x and 1:size_y where as the study number starts at 0. More... | |
| int | launch_new (const char *name, bool quick=false) |
| This launch a code from within this code. Please pass the name of the code to run. More... | |
| void | set_name (const char *name) |
| Sets the name of the problem, used for the same data files. More... | |
| std::string | get_name () |
| Allows the problem_name to be accessed. More... | |
| std::fstream & | get_data_file () |
| Allows the problem_name to be accessed. More... | |
| std::fstream & | get_stat_file () |
| Allows the problem_name to be accessed. More... | |
| std::fstream & | get_fstat_file () |
| Allows the problem_name to be accessed. More... | |
| std::fstream & | get_ene_file () |
| Allows the problem_name to be accessed. More... | |
| void | set_fstat_filename (std::string filename) |
| void | set_data_filename (std::string filename) |
| void | set_stat_filename (std::string filename) |
| void | set_ene_filename (std::string filename) |
| void | set_fstat_filename () |
| void | set_data_filename () |
| void | set_stat_filename () |
| void | set_ene_filename () |
| std::string | get_fstat_filename () |
| std::string | get_data_filename () |
| std::string | get_stat_filename () |
| std::string | get_ene_filename () |
| void | set_step_size (unsigned int new_) |
| unsigned int | get_step_size () |
| void | set_options_fstat (unsigned int new_) |
| set and get for file options More... | |
| unsigned int | get_options_fstat (void) |
| void | set_options_data (unsigned int new_) |
| unsigned int | get_options_data (void) |
| void | set_options_stat (unsigned int new_) |
| unsigned int | get_options_stat (void) |
| void | set_options_restart (unsigned int new_) |
| unsigned int | get_options_restart (void) |
| void | set_options_ene (unsigned int new_) |
| unsigned int | get_options_ene (void) |
| bool | open_file (std::fstream &file, std::string filename, unsigned int options, std::fstream::openmode mode) |
| bool | open_fstat_file (std::fstream::openmode mode=std::fstream::out) |
| bool | open_data_file (std::fstream::openmode mode=std::fstream::out) |
| bool | open_stat_file (std::fstream::openmode mode=std::fstream::out) |
| bool | open_ene_file (std::fstream::openmode mode=std::fstream::out) |
| bool | open_counted_file (std::fstream &file, std::string filenameNoCount, std::fstream::openmode mode) |
| opens file needed if data is written in multiple files More... | |
| bool | increase_counter_fstat (std::fstream::openmode mode) |
| bool | increase_counter_data (std::fstream::openmode mode) |
| bool | increase_counter_stat (std::fstream::openmode mode) |
| bool | increase_counter_ene (std::fstream::openmode mode) |
| void | set_file_counter (int new_) |
| int | get_file_counter () |
Protected Member Functions | |
| void | HGRID_UpdateParticleInHgrid (BaseParticle *obj) |
| This adds a partcile to the Grid, called in the grid setup routies. More... | |
| void | HGRID_RemoveParticleFromHgrid (BaseParticle *obj) |
| virtual void | CheckCell (int x, int y, int z, int l, BaseParticle *obj, HGrid *grid) |
| Check collisions for a general cell. More... | |
| virtual void | CheckCell_current (int x, int y, int z, int l, HGrid *grid) |
| Checks for a collision in the particles own cell. More... | |
| void | CheckObjAgainstGrid (HGrid *grid, BaseParticle *obj) |
| Check if an Particle has a collision in the grid; avoids multiple checks. More... | |
| void | CheckObjAgainstWholeGrid (HGrid *grid, BaseParticle *obj) |
| Check if an Particle has a collision in the grid. More... | |
| bool | TestCell (int x, int y, int z, int l, BaseParticle *obj, HGrid *grid) |
| Tests obj against all particles in cell similar to CheckCell, but links to TestObject instead of compute_internal_forces. More... | |
| bool | TestObjAgainstGrid (HGrid *grid, BaseParticle *obj) |
| Tests obj against all neighbouring particles similar to CheckObjAgainstGrid, but links to TestCell instead of CheckCell. More... | |
| Protected Member Functions inherited from HGRID_base | |
| void | InitBroadPhase () |
| This sets up the parameters required for the contact model. More... | |
| void | HGRID_InsertParticleToHgrid (BaseParticle *obj) |
| Inserts a single Particle to current grid. More... | |
| void | broad_phase (BaseParticle *i) |
| This makes the board_phase of contact point at the HGRID code. More... | |
| virtual bool | TestObject (BaseParticle *pI, BaseParticle *pJ) |
| criterium for inserting a particle (returns false, if particles overlap;) More... | |
| void | HGRID_update_move (BaseParticle *iP, Mdouble move) |
| void | HGRID_actions_before_integration () |
| void | HGRID_actions_after_integration () |
| int | readNextArgument (unsigned int &i, unsigned int argc, char *argv[]) |
| Protected Member Functions inherited from MD | |
| virtual void | compute_all_forces () |
| This does the force computation. More... | |
| virtual void | compute_internal_forces (BaseParticle *i) |
| Computes the forces between particles (internal in the sence that the sum over all these forces is zero i.e. fully modelled forces) More... | |
| CTangentialSpring * | getTangentialSpring (BaseParticle *PI, BaseParticle *PJ, BaseParticle *PJreal) |
| CTangentialSpring * | getTangentialSpringWall (BaseParticle *pI, int w) |
| virtual void | compute_internal_forces (BaseParticle *P1, BaseParticle *P2) |
| Computes the forces between particles (internal in the sence that the sum over all these forces is zero i.e. fully modelled forces) More... | |
| void | compute_plastic_internal_forces (BaseParticle *P1, BaseParticle *P2) |
| Computes plastic forces between particles. More... | |
| virtual void | compute_external_forces (BaseParticle *PI) |
| This is were the computation of external forces takes place (e.g. gravity) More... | |
| virtual void | compute_walls (BaseParticle *PI) |
| This is were the walls are. More... | |
| Mdouble | computeShortRangeForceWithWall (BaseParticle *pI, int wall, CSpecies *pSpecies, Mdouble dist) |
| Mdouble | computeShortRangeForceWithParticle (BaseParticle *PI, BaseParticle *PJ, BaseParticle *PJreal, CSpecies *pSpecies, Mdouble dist) |
| virtual void | actions_before_time_loop () |
| This is actions before the start of the main time loop. More... | |
| virtual void | HGRID_InsertParticleToHgrid (BaseParticle *obj UNUSED) |
| This is action before the time step is started. More... | |
| virtual void | HGRID_UpdateParticleInHgrid (BaseParticle *obj UNUSED) |
| virtual void | HGRID_RemoveParticleFromHgrid (BaseParticle *obj UNUSED) |
| virtual bool | get_HGRID_UpdateEachTimeStep () |
| virtual void | actions_before_time_step () |
| This is action before the time step is started. More... | |
| virtual void | actions_after_solve () |
| This is actions at the end of the code, but before the files are closed. More... | |
| virtual void | actions_after_time_step () |
| This is action after the time step is finished. More... | |
| virtual void | output_xballs_data () |
| Output xball data for Particle i. More... | |
| virtual void | output_xballs_data_particle (int i) |
| This function outputs the location and velocity of the particle in a format the xballs progream can read. More... | |
| virtual void | start_ene () |
| Functions for ene file. More... | |
| virtual void | fstat_header () |
| virtual void | output_ene () |
| This function outputs statistical data - The default is to compute the rotational kinetic engergy, linear kinetic energy, and the centre of mass. More... | |
| virtual void | initialize_statistics () |
| Functions for statistics. More... | |
| virtual void | output_statistics () |
| virtual void | gather_statistics_collision (int index1 UNUSED, int index2 UNUSED, Vec3D Contact UNUSED, Mdouble delta UNUSED, Mdouble ctheta UNUSED, Mdouble fdotn UNUSED, Mdouble fdott UNUSED, Vec3D P1_P2_normal_ UNUSED, Vec3D P1_P2_tangential UNUSED) |
| virtual void | process_statistics (bool usethese UNUSED) |
| virtual void | finish_statistics () |
| virtual void | set_initial_pressures_for_pressure_controlled_walls () |
| virtual void | do_integration_before_force_computation (BaseParticle *pI) |
| This is were the integration is done. More... | |
| virtual void | checkInteractionWithBoundaries () |
| virtual void | do_integration_after_force_computation (BaseParticle *pI) |
| This is were the integration is done. More... | |
| void | set_FixedParticles (unsigned int n) |
| void | initialize_tangential_springs () |
| void | compute_particle_masses () |
| Computes the mass of each particle. More... | |
| virtual void | cout_time () |
| std::couts time More... | |
| virtual bool | continue_solve () |
| void | reset_DeltaMax () |
| sets the history parameter DeltaMax of all particles to zero More... | |
| void | reset_TangentialSprings () |
| sets the history parameter TangentialSprings of all particles to zero More... | |
Additional Inherited Members | |
| Public Attributes inherited from HGRID_base | |
| HGrid * | grid |
| Public Attributes inherited from MD | |
| RNG | random |
| Protected Attributes inherited from MD | |
| std::vector< CSpecies > | Species |
| These are the particle parameters like dissipation etc. More... | |
| Protected Attributes inherited from STD_save | |
| std::stringstream | problem_name |
| Stores the problem_name. More... | |
| std::stringstream | data_filename |
| These store the save file names, by default they are derived from problem_name. More... | |
| std::stringstream | stat_filename |
| std::stringstream | fstat_filename |
| std::stringstream | ene_filename |
| std::fstream | data_file |
| Stream used for data files. More... | |
| std::fstream | stat_file |
| std::fstream | fstat_file |
| std::fstream | ene_file |
| unsigned int | options_fstat |
| Indicators if files are created or not 0: file will not be created 1: file will be written in one file 2: file will be written in multiple files. More... | |
| unsigned int | options_data |
| unsigned int | options_stat |
| unsigned int | options_ene |
| unsigned int | options_restart |
| unsigned int | file_counter |
| Counter needed if file will be written in multiple files. More... | |
| unsigned int | step_size |
This adds on the hierarchical grid code for 3D problems.
Definition at line 35 of file HGRID_3D.h.
|
inline |
This is the default constructor. All it does is set senible defaults.
Definition at line 40 of file HGRID_3D.h.
References constructor().
|
inline |
Copy-constructor for creates an HGRID problem from an existing MD problem.
Definition at line 53 of file HGRID_3D.h.
|
inline |
Definition at line 60 of file HGRID_3D.h.
|
protectedvirtual |
Check collisions for a general cell.
Check for collisions with a general cell.
Definition at line 58 of file HGRID_3D.cc.
References MD::compute_internal_forces(), HGrid::ComputeHashBucketIndex(), BaseParticle::get_HGRID_Level(), BaseParticle::get_HGRID_NextObject(), BaseParticle::get_HGRID_x(), BaseParticle::get_HGRID_y(), BaseParticle::get_HGRID_z(), and HGrid::objectBucket.
Referenced by CheckObjAgainstGrid().
Checks for a collision in the particles own cell.
Checks for collision in the particles own cell.
Definition at line 31 of file HGRID_3D.cc.
References HGrid::bucketIsChecked, MD::compute_internal_forces(), HGrid::ComputeHashBucketIndex(), BaseParticle::get_HGRID_Level(), BaseParticle::get_HGRID_NextObject(), BaseParticle::get_HGRID_x(), BaseParticle::get_HGRID_y(), BaseParticle::get_HGRID_z(), and HGrid::objectBucket.
Referenced by CheckObjAgainstGrid().
|
protectedvirtual |
Check if an Particle has a collision in the grid; avoids multiple checks.
Test collisions between object and all objects in hgrid.
Implements HGRID_base.
Definition at line 83 of file HGRID_3D.cc.
References BOTTOMUP, HGrid::cellSizes_, CheckCell(), CheckCell_current(), BaseParticle::get_HGRID_Level(), BaseParticle::get_HGRID_x(), BaseParticle::get_HGRID_y(), BaseParticle::get_HGRID_z(), BaseParticle::get_InteractionRadius(), BaseParticle::get_Position(), HGRID_base::getHGridMethod(), HGrid::invCellSizes_, HGrid::occupiedLevelsMask, TOPDOWN, Vec3D::X, Vec3D::Y, and Vec3D::Z.
|
protected |
Check if an Particle has a collision in the grid.
|
inline |
This is the actually constructor it is called do both constructors above.
Definition at line 69 of file HGRID_3D.h.
References MD::set_dim(), and MD::set_dim_particle().
Referenced by HGRID_3D().
|
protected |
Definition at line 269 of file HGRID_3D.cc.
References HGrid::ComputeHashBucketIndex(), BaseParticle::get_HGRID_Level(), BaseParticle::get_HGRID_NextObject(), BaseParticle::get_HGRID_PrevObject(), BaseParticle::get_HGRID_x(), BaseParticle::get_HGRID_y(), BaseParticle::get_HGRID_z(), HGRID_base::grid, HGrid::objectBucket, BaseParticle::set_HGRID_NextObject(), and BaseParticle::set_HGRID_PrevObject().
Referenced by HGRID_UpdateParticleInHgrid().
|
protected |
This adds a partcile to the Grid, called in the grid setup routies.
Add object to grid square, and remember cell and level numbers, treating level as a third dimension coordinate.
Definition at line 220 of file HGRID_3D.cc.
References HGrid::ComputeHashBucketIndex(), BaseParticle::get_HGRID_Level(), BaseParticle::get_HGRID_x(), BaseParticle::get_HGRID_y(), BaseParticle::get_HGRID_z(), BaseParticle::get_PeriodicFromParticle(), BaseParticle::get_Position(), HGRID_base::grid, HGRID_RemoveParticleFromHgrid(), HGrid::invCellSizes_, HGrid::objectBucket, BaseParticle::set_HGRID_NextObject(), BaseParticle::set_HGRID_PrevObject(), BaseParticle::set_HGRID_x(), BaseParticle::set_HGRID_y(), BaseParticle::set_HGRID_z(), Vec3D::X, Vec3D::Y, and Vec3D::Z.
Referenced by Chute::add_particle(), and Chute::IsInsertable().
Tests obj against all particles in cell similar to CheckCell, but links to TestObject instead of compute_internal_forces.
Definition at line 286 of file HGRID_3D.cc.
References HGrid::ComputeHashBucketIndex(), BaseParticle::get_HGRID_Level(), BaseParticle::get_HGRID_NextObject(), BaseParticle::get_HGRID_x(), BaseParticle::get_HGRID_y(), BaseParticle::get_HGRID_z(), HGrid::objectBucket, and HGRID_base::TestObject().
Referenced by TestObjAgainstGrid().
|
protected |
Tests obj against all neighbouring particles similar to CheckObjAgainstGrid, but links to TestCell instead of CheckCell.
Definition at line 310 of file HGRID_3D.cc.
References HGrid::cellSizes_, BaseParticle::get_Position(), HGrid::invCellSizes_, HGrid::occupiedLevelsMask, TestCell(), Vec3D::X, Vec3D::Y, and Vec3D::Z.
Referenced by Chute::IsInsertable().
 1.8.7
1.8.7